Statistical Models
Lecture 2
Lecture 2:
Random samples
Outline of Lecture 2
- Probability revision III
- Multivariate random vectors
- Random samples
- Unbiased estimators
- Chi-squared distribution
- Sampling from normal distribution
- t-distribution
Part 1:
Probability revision III
Probability revision III
You are expected to be familiar with the main concepts from Y1 module
Introduction to Probability & StatisticsSelf-contained revision material available in Appendix A
Topics to review: Sections 6–7 of Appendix A
- Independence of random variables
- Covariance and correlation
Independence of random variables
Definition: Independence
Independence of random variables
Conditional distributions and probabilities
If X and Y are independent then X gives no information on Y (and vice-versa):
Conditional distribution: Y|X is same as Y f(y|x) = \frac{f_{X,Y}(x,y)}{f_X(x)} = \frac{f_X(x)f_Y(y)}{f_X(x)} = f_Y(y)
Conditional probabilities: From the above we also obtain \begin{align*} P(Y \in A | x) & = \sum_{y \in A} f(y|x) = \sum_{y \in A} f_Y(y) = P(Y \in A) & \, \text{ discrete rv} \\ P(Y \in A | x) & = \int_{y \in A} f(y|x) \, dy = \int_{y \in A} f_Y(y) \, dy = P(Y \in A) & \, \text{ continuous rv} \end{align*}
Independence of random variables
Characterization of independence - Densities
Theorem
(X,Y) random vector with joint pdf or pmf f_{X,Y}. They are equivalent:
- X and Y are independent random variables
- There exist functions g(x) and h(y) such that f_{X,Y}(x,y) = g(x)h(y) \,, \quad \forall \, (x,y) \in \mathbb{R}^2
Note:
- g(x) and h(y) are not necessarily the pdfs or pmfs of X and Y
- However they coincide with f_X and f_Y, up to rescaling by a constant
Exercise
A student leaves for class between 8 AM and 8:30 AM and takes between 40 and 50 minutes to get there
Denote by X the time of departure
- X = 0 corresponds to 8 AM
- X = 30 corresponds to 8:30 AM
Denote by Y the travel time
Assume that X and Y are independent and uniformly distributed
Question: Find the probability that the student arrives to class before 9 AM
Solution
By assumption X is uniform on (0,30). Therefore f_X(x) = \begin{cases} \frac{1}{30} & \text{ if } \, x \in (0,30) \\ 0 & \text{ otherwise } \end{cases}
By assumption Y is uniform on (40,50). Therefore f_Y(y) = \begin{cases} \frac{1}{10} & \text{ if } \, y \in (40,50) \\ 0 & \text{ otherwise } \end{cases} where we used that 50 - 40 = 10
Solution
Define the rectangle R = (0,30) \times (40,50)
Since X and Y are independent, we get
f_{X,Y}(x,y) = f_X(x)f_Y(y) = \begin{cases} \frac{1}{300} & \text{ if } \, (x,y) \in R \\ 0 & \text{ otherwise } \end{cases}
Solution
The arrival time is given by X + Y
Therefore, the student arrives to class before 9 AM iff X + Y < 60
Notice that \{X + Y < 60 \} = \{ (x,y) \in \mathbb{R}^2 \, \colon \, 0 \leq x < 60 - y, 40 \leq y < 50 \}
Solution
Therefore, the probability of arriving before 9 AM is
\begin{align*} P(\text{arrives before 9 AM}) & = P(X + Y < 60) \\ & = \int_{\{X+Y < 60\}} f_{X,Y} (x,y) \, dxdy \\ & = \int_{40}^{50} \left( \int_0^{60-y} \frac{1}{300} \, dx \right) \, dy \\ & = \frac{1}{300} \int_{40}^{50} (60 - y) \, dy \\ & = \frac{1}{300} \ y \left( 60 - \frac{y}{2} \right) \Bigg|_{y=40}^{y=50} \\ & = \frac{1}{300} \cdot (1750 - 1600) = \frac12 \end{align*}
Consequences of independence
Theorem
Suppose X and Y are independent random variables. Then
For any A,B \subset \mathbb{R} we have P(X \in A, Y \in B) = P(X \in A) P(Y \in B)
Suppose g(x) is a function of (only) x, h(y) is a function of (only) y. Then {\rm I\kern-.3em E}[g(X)h(Y)] = {\rm I\kern-.3em E}[g(X)]{\rm I\kern-.3em E}[h(Y)]
Application: MGF of sums
Theorem
Proof: Follows by previous Theorem \begin{align*} M_{X + Y} (t) & = {\rm I\kern-.3em E}[e^{t(X+Y)}] = {\rm I\kern-.3em E}[e^{tX}e^{tY}] \\ & = {\rm I\kern-.3em E}[e^{tX}] {\rm I\kern-.3em E}[e^{tY}] \\ & = M_X(t) M_Y(t) \end{align*}
Example - Sum of independent normals
Suppose X \sim N (\mu_1, \sigma_1^2) and Y \sim N (\mu_2, \sigma_2^2) are independent normal random variables
We have seen in Lecture 1 that for normal distributions M_X(t) = \exp \left( \mu_1 t + \frac{t^2 \sigma_1^2}{2} \right) \,, \qquad M_Y(t) = \exp \left( \mu_2 t + \frac{t^2 \sigma_2^2}{2} \right)
Since X and Y are independent, from previous Theorem we get \begin{align*} M_{X+Y}(t) & = M_{X}(t) M_{Y}(t) = \exp \left( \mu_1 t + \frac{t^2 \sigma_1^2}{2} \right) \exp \left( \mu_2 t + \frac{t^2 \sigma_2^2}{2} \right) \\ & = \exp \left( (\mu_1 + \mu_2) t + \frac{t^2 (\sigma_1^2 + \sigma_2^2)}{2} \right) \end{align*}
Example - Sum of independent normals
Therefore Z := X + Y has moment generating function M_{Z}(t) = M_{X+Y}(t) = \exp \left( (\mu_1 + \mu_2) t + \frac{t^2 (\sigma_1^2 + \sigma_2^2)}{2} \right)
The above is the mgf of a normal distribution with \text{mean }\quad \mu_1 + \mu_2 \quad \text{ and variance} \quad \sigma_1^2 + \sigma_2^2
By the Theorem in Slide 68 of Lecture 1 we have Z \sim N(\mu_1 + \mu_2, \sigma_1^2 + \sigma_2^2)
Sum of independent normals is normal
Covariance & Correlation
Relationship between RV
Given two random variables X and Y we said that
X and Y are independent if f_{X,Y}(x,y) = f_X(x) g_Y(y)
In this case there is no relationship between X and Y
This is reflected in the conditional distributions: X|Y \sim X \qquad \qquad Y|X \sim Y
Covariance & Correlation
Relationship between RV
If X and Y are not independent then there is a relationship between them
Question
Answer: By introducing the notions of
- Covariance
- Correlation
Covariance
Definition
Notation: Given two rv X and Y we denote \begin{align*} & \mu_X := {\rm I\kern-.3em E}[X] \qquad & \mu_Y & := {\rm I\kern-.3em E}[Y] \\ & \sigma^2_X := {\rm Var}[X] \qquad & \sigma^2_Y & := {\rm Var}[Y] \end{align*}
Definition
Covariance
Alternative Formula
Theorem
Correlation
Remark:
{\rm Cov}(X,Y) encodes only qualitative information about the relationship between X and Y
To obtain quantitative information we introduce the correlation
Definition
Correlation detects linear relationships
Theorem
For any random variables X and Y we have
- - 1\leq \rho_{XY} \leq 1
- |\rho_{XY}|=1 if and only if there exist a,b \in \mathbb{R} such that
P(Y = aX + b) = 1
- If \rho_{XY}=1 then a>0 \qquad \qquad \quad (positive linear correlation)
- If \rho_{XY}=-1 then a<0 \qquad \qquad (negative linear correlation)
Proof: Omitted, see page 172 of [1]
Correlation & Covariance
Independent random variables
Theorem
Proof:
- If X and Y are independent then {\rm I\kern-.3em E}[XY]={\rm I\kern-.3em E}[X]{\rm I\kern-.3em E}[Y]
- Therefore {\rm Cov}(X,Y)= {\rm I\kern-.3em E}[XY]-{\rm I\kern-.3em E}[X]{\rm I\kern-.3em E}[Y] = 0
- Moreover \rho_{XY}=0 by definition
Formula for Variance
Variance is quadratic
Theorem
Proof: Exercise
Example 1
Assume X and Z are independent, and X \sim {\rm uniform} \left( 0,1 \right) \,, \qquad Z \sim {\rm uniform} \left( 0, \frac{1}{10} \right)
Consider the random variable Y = X + Z
Since X and Z are independent, and Z is uniform, we have that Y | X = x \, \sim \, {\rm uniform} \left( x, x + \frac{1}{10} \right) (adding x to Z simply shifts the uniform distribution of Z by x)
Question: Is the correlation \rho_{XY} between X and Y high or low?
Example 1
As Y | X \, \sim \, {\rm uniform} \left( X, X + \frac{1}{10} \right), the conditional pdf of Y given X = x is f(y|x) = \begin{cases} 10 & \text{ if } \, y \in \left( x , x + \frac{1}{10} \right) \\ 0 & \text{ otherwise} \end{cases}
As X \sim {\rm uniform} (0,1), its pdf is f_X(x) = \begin{cases} 1 & \text{ if } \, x \in \left( 0 , 1 \right) \\ 0 & \text{ otherwise} \end{cases}
Therefore, the joint distribution of (X,Y) is f_{X,Y}(x,y) = f(y|x)f_X(x) = \begin{cases} 10 & \text{ if } \, x \in (0,1) \, \text{ and } \, y \in \left( x , x + \frac{1}{10} \right) \\ 0 & \text{ otherwise} \end{cases}
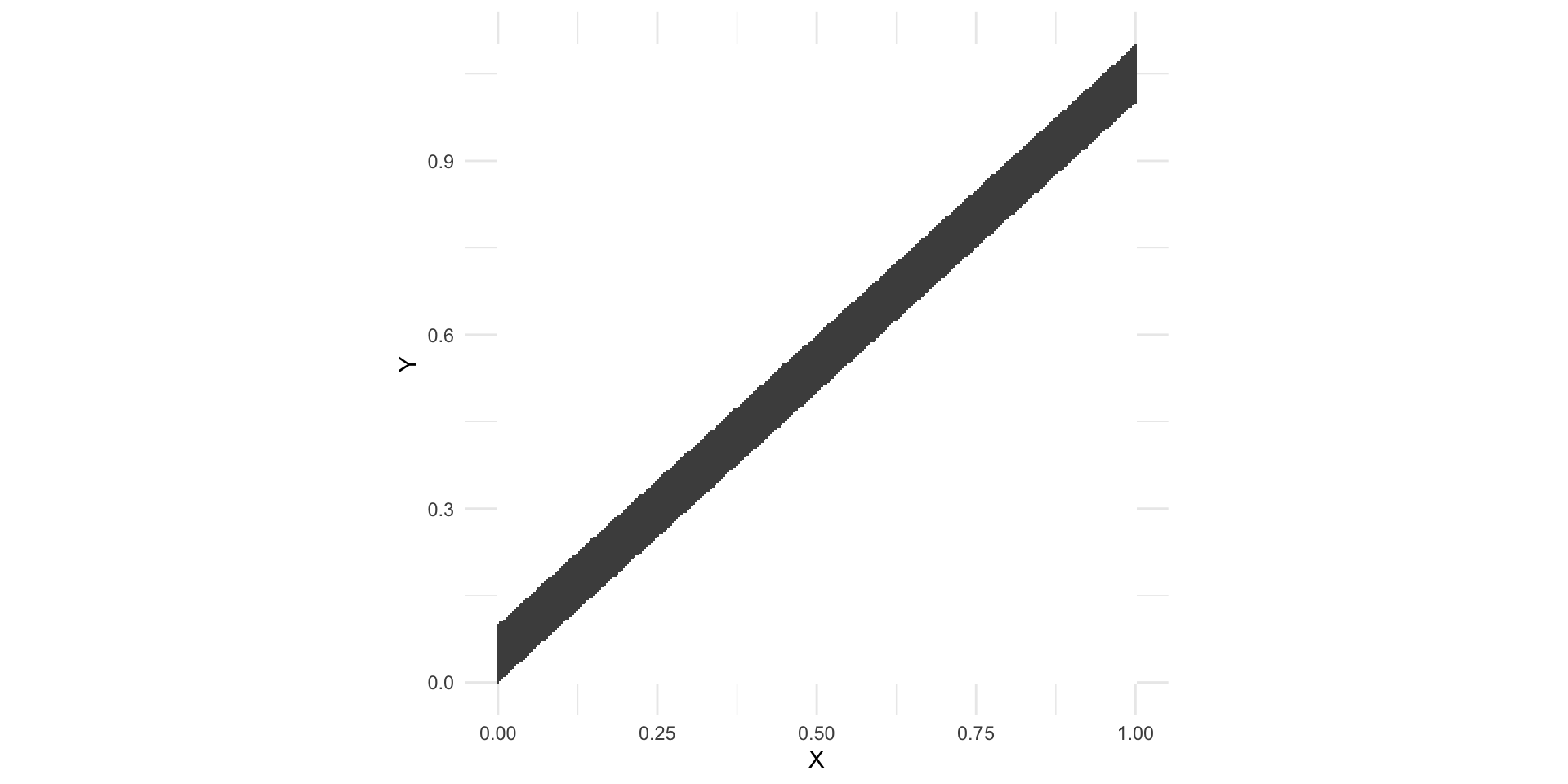
Example 1
In gray: the region where f_{X,Y}(x,y)>0
- When X increases, Y increases linearly (not surprising, since Y = X + Z)
- We expect the correlation \rho_{XY} to be close to 1
Example 1 – Computing \rho_{XY}
For a random variable W \sim {\rm uniform} (a,b), we have {\rm I\kern-.3em E}[W] = \frac{a+b}{2} \,, \qquad {\rm Var}[W] = \frac{(b-a)^2}{12}
Since X \sim {\rm uniform} (0,1) and Z \sim {\rm uniform} (0,1/10), we have {\rm I\kern-.3em E}[X] = \frac12 \,, \qquad {\rm Var}[X] = \frac{1}{12} \,, \qquad {\rm I\kern-.3em E}[Z] = \frac{1}{20} \,, \qquad {\rm Var}[Z] = \frac{1}{1200}
Since X and Z are independent, we also have {\rm Var}[Y] = {\rm Var}[X + Z] = {\rm Var}[X] + {\rm Var}[Z] = \frac{1}{12} + \frac{1}{1200}
Example 1 – Computing \rho_{XY}
Since X and Z are independent, we have {\rm I\kern-.3em E}[XZ] = {\rm I\kern-.3em E}[X]{\rm I\kern-.3em E}[Z]
We conclude that \begin{align*} {\rm Cov}(X,Y) & = {\rm I\kern-.3em E}[XY] - {\rm I\kern-.3em E}[X] {\rm I\kern-.3em E}[Y] \\ & = {\rm I\kern-.3em E}[X(X + Z)] - {\rm I\kern-.3em E}[X] {\rm I\kern-.3em E}[X + Z] \\ & = {\rm I\kern-.3em E}[X^2] - {\rm I\kern-.3em E}[X]^2 + {\rm I\kern-.3em E}[XZ] - {\rm I\kern-.3em E}[X]{\rm I\kern-.3em E}[Z] \\ & = {\rm Var}[X] = \frac{1}{12} \end{align*}
Example 1 – Computing \rho_{XY}
The correlation between X and Y is \begin{align*} \rho_{XY} & = \frac{{\rm Cov}(X,Y)}{\sqrt{{\rm Var}[X]}\sqrt{{\rm Var}[Y]}} \\ & = \frac{\frac{1}{12}}{\sqrt{\frac{1}{12}} \sqrt{ \frac{1}{12} + \frac{1}{1200}} } = \sqrt{\frac{100}{101}} \end{align*}
As expected, we have very high correlation \rho_{XY} \approx 1
This confirms a very strong linear relationship between X and Y
Example 2
Assume X and Z are independent, and X \sim {\rm uniform} \left( -1,1 \right) \,, \qquad Z \sim {\rm uniform} \left( 0, \frac{1}{10} \right)
Define the random variable Y = X^2 + Z
Since X and Z are independent, and Z is uniform, we have that Y | X = x \, \sim \, {\rm uniform} \left( x^2, x^2 + \frac{1}{10} \right) (adding x^2 to Z simply shifts the uniform distribution of Z by x^2)
Question: Is the correlation \rho_{XY} between X and Y high or low?
Example 2
As Y | X \, \sim \, {\rm uniform} \left( X^2, X^2 + \frac{1}{10} \right), the conditional pdf of Y given X = x is f(y|x) = \begin{cases} 10 & \text{ if } \, y \in \left( x^2 , x^2 + \frac{1}{10} \right) \\ 0 & \text{ otherwise} \end{cases}
As X \sim {\rm uniform} (-1,1), its pdf is f_X(x) = \begin{cases} \frac12 & \text{ if } \, x \in \left( -1 , 1 \right) \\ 0 & \text{ otherwise} \end{cases}
Therefore, the joint distribution of (X,Y) is f_{X,Y}(x,y) = f(y|x)f_X(x) = \begin{cases} 10 & \text{ if } \, x \in (-1,1) \, \text{ and } \, y \in \left( x^2 , x^2 + \frac{1}{10} \right) \\ 0 & \text{ otherwise} \end{cases}
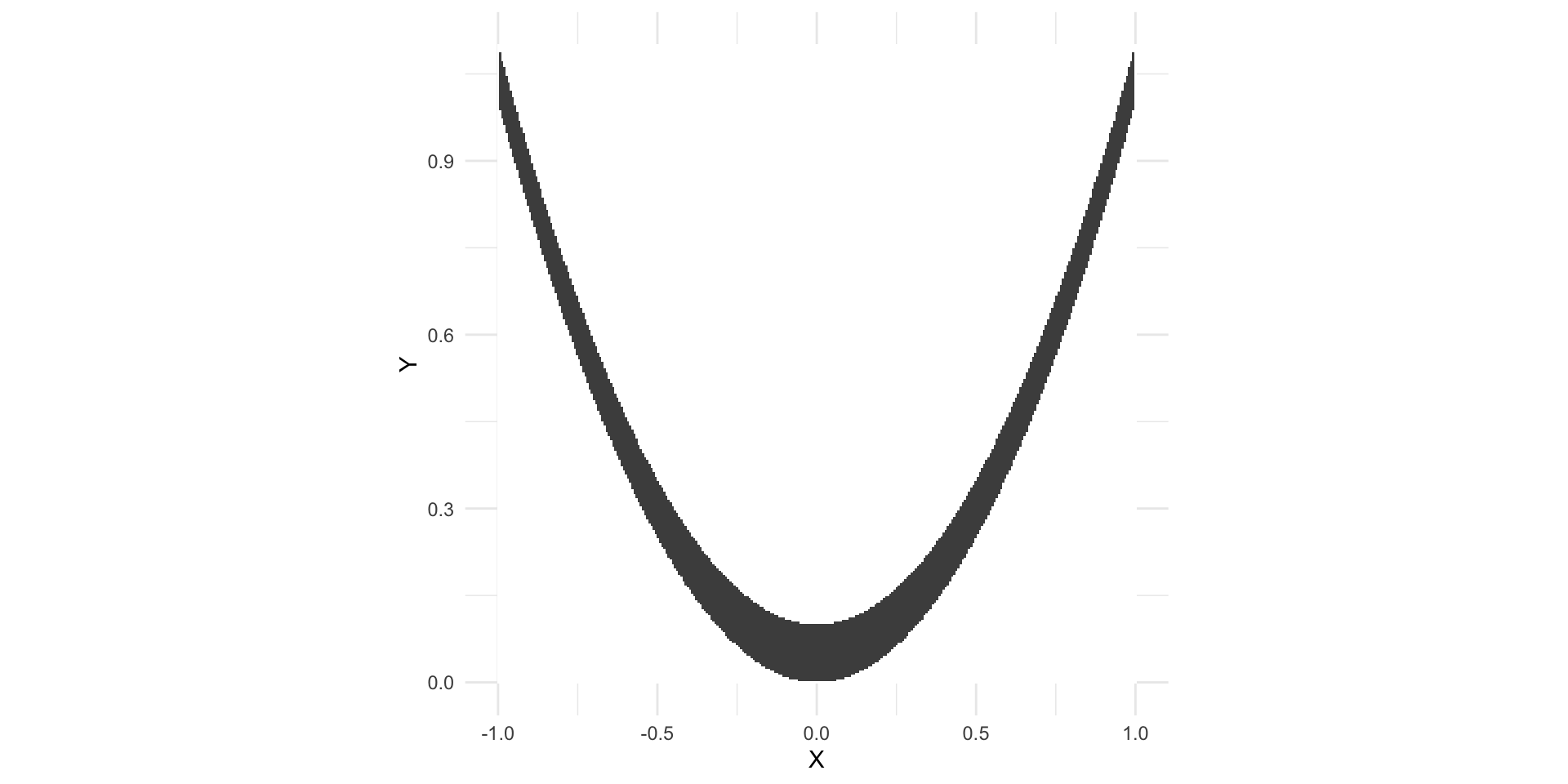
Example 2
In gray: the region where f_{X,Y}(x,y)>0
- When X increases, Y increases quadratically (not surprising, as Y = X^2 + Z)
- There is no linear relationship between X and Y \,\, \implies \,\, we expect \, \rho_{XY} \approx 0
Example 2 – Computing \rho_{XY}
Since X \sim {\rm uniform} (-1,1), we can compute that {\rm I\kern-.3em E}[X] = {\rm I\kern-.3em E}[X^3] = 0
Since X and Z are independent, we have {\rm I\kern-.3em E}[XZ] = {\rm I\kern-.3em E}[X]{\rm I\kern-.3em E}[Z] = 0
Example 2 – Computing \rho_{XY}
Compute the covariance \begin{align*} {\rm Cov}(X,Y) & = {\rm I\kern-.3em E}[XY] - {\rm I\kern-.3em E}[X] {\rm I\kern-.3em E}[Y] \\ & = {\rm I\kern-.3em E}[XY] \\ & = {\rm I\kern-.3em E}[X(X^2 + Z)] \\ & = {\rm I\kern-.3em E}[X^3] + {\rm I\kern-.3em E}[XZ] = 0 \end{align*}
The correlation between X and Y is \rho_{XY} = \frac{{\rm Cov}(X,Y)}{\sqrt{{\rm Var}[X]}\sqrt{{\rm Var}[Y]}} = 0
This confirms there is no linear relationship between X and Y
Part 2:
Multivariate random vectors
Multivariate Random Vectors
Recall
- A Random vector is a function \mathbf{X}\colon \Omega \to \mathbb{R}^n
- \mathbf{X} is a multivariate random vector if n \geq 3
- We denote the components of \mathbf{X} by \mathbf{X}= (X_1,\ldots,X_n) \,, \qquad X_i \colon \Omega \to \mathbb{R}
- We denote the components of a point \mathbf{x}\in \mathbb{R}^n by \mathbf{x}= (x_1,\ldots,x_n)
Discrete and Continuous Multivariate Random Vectors
Everything we defined for bivariate vectors extends to multivariate vectors
Definition
The random vector \mathbf{X}\colon \Omega \to \mathbb{R}^n is:
- continuous if components X_is are continuous
- discrete if components X_i are discrete
Joint pmf
Definition
Note: For all A \subset \mathbb{R}^n it holds P(\mathbf{X}\in A) = \sum_{\mathbf{x}\in A} f_{\mathbf{X}}(\mathbf{x})
Joint pdf
Definition
Note: \int_A denotes an n-fold intergral over all points \mathbf{x}\in A
Expected Value
Definition
Marginal distributions
Marginal pmf or pdf of any subset of the coordinates (X_1,\ldots,X_n) can be computed by integrating or summing the remaining coordinates
To ease notations, we only define maginals wrt the first k coordinates
Definition
Marginal distributions
We use a special notation for marginal pmf or pdf wrt a single coordinate
Definition
Conditional distributions
We now define conditional distributions given the first k coordinates
Definition
Conditional distributions
Similarly, we can define the conditional distribution given the i-th coordinate
Definition
Independence
Definition
Proposition
Independence
Characterization result
Theorem
\mathbf{X}=(X_1,\ldots,X_n) random vector with joint pmf or pdf f_{\mathbf{X}}. They are equivalent:
- The random variables X_1,\ldots,X_n are mutually independent
- There exist functions g_i(x_i) such that f_{\mathbf{X}}(x_1,\ldots,x_n) = \prod_{i=1}^n g_{i}(x_i)
Independence
A very useful theorem
Theorem
Proof: Omitted. See [1] page 184
Example: X_1,\ldots,X_n \, independent \,\, \implies \,\, X_1^2, \ldots, X_n^2 \, independent
Independence
Expectation of product
Theorem
Application: MGF of sums
Theorem
Application: MGF of sums
Proof of Theorem
Follows by the previous Theorem
\begin{align*} M_{Z} (t) & = {\rm I\kern-.3em E}[e^{tZ}] \\ & = {\rm I\kern-.3em E}[\exp( t X_1 + \ldots + tX_n)] \\ & = {\rm I\kern-.3em E}\left[ e^{t X_1} \cdot \ldots \cdot e^{ t X_n} \right] \\ & = \prod_{i=1}^n {\rm I\kern-.3em E}[e^{tX_i}] \\ & = \prod_{i=1}^n M_{X_i}(t) \end{align*}
Example – Sum of independent Normals
Theorem
Example – Sum of independent Normals
Proof of Theorem
We have seen in Lecture 1 that X_i \sim N(\mu_i,\sigma_i^2) \quad \implies \quad M_{X_i}(t) = \exp \left( \mu_i t + \frac{t^2 \sigma_i^2}{2} \right)
As X_1,\ldots,X_n are mutually independent, from the Theorem in Slide 47, we get \begin{align*} M_{Z}(t) & = \prod_{i=1}^n M_{X_i}(t) = \prod_{i=1}^n \exp \left( \mu_i t + \frac{t^2 \sigma_i^2}{2} \right) \\ & = \exp \left( (\mu_1 + \ldots + \mu_n) t + \frac{t^2 (\sigma_1^2 + \ldots +\sigma_n^2)}{2} \right) \\ & = \exp \left( \mu t + \frac{t^2 \sigma^2 }{2} \right) \end{align*}
Example – Sum of independent Normals
Proof of Theorem
Therefore Z has moment generating function M_{Z}(t) = \exp \left( \mu t + \frac{t^2 \sigma^2 }{2} \right)
The above is the mgf of a normal distribution with \text{mean }\quad \mu \quad \text{ and variance} \quad \sigma^2
Since mgfs characterize distributions (see Theorem in Slide 71 of Lecture 1), we conclude Z \sim N(\mu, \sigma^2 )
Example – Sum of independent Gammas
Theorem
Example – Sum of independent Gammas
Proof of Theorem
We have seen in Lecture 1 that X_i \sim \Gamma(\alpha_i,\beta) \qquad \implies \qquad M_{X_i}(t) = \frac{\beta^{\alpha_i}}{(\beta-t)^{\alpha_i}}
As X_1,\ldots,X_n are mutually independent, from the Theorem in Slide 47, we get \begin{align*} M_{Z}(t) & = \prod_{i=1}^n M_{X_i}(t) = \prod_{i=1}^n \frac{\beta^{\alpha_i}}{(\beta-t)^{\alpha_i}} \\ & = \frac{\beta^{(\alpha_1 + \ldots + \alpha_n)}}{(\beta-t)^{(\alpha_1 + \ldots + \alpha_n)}} \\ & = \frac{\beta^{\alpha}}{(\beta-t)^{\alpha}} \end{align*}
Example – Sum of independent Gammas
Proof of Theorem
Therefore Z has moment generating function M_{Z}(t) = \frac{\beta^{\alpha}}{(\beta-t)^{\alpha}}
The above is the mgf of a Gamma distribution with parameters \alpha and \beta
Since mgfs characterize distributions (see Theorem in Slide 71 of Lecture 1), we conclude Z \sim \Gamma(\alpha, \beta )
Expectation of sums
Expectation is linear
Theorem
Variance of sums
Variance is quadratic
Theorem
Part 3:
Random samples
iid random variables
Definition
The random variables X_1,\ldots,X_n are independent identically distributed or iid with pdf or pmf f(x) if
- X_1,\ldots,X_n are mutually independent
- The marginal pdf or pmf of each X_i satisfies f_{X_i}(x) = f(x) \,, \quad \forall \, x \in \mathbb{R}
Random sample
- Suppose the data in an experiment consists of observations on a population
- Suppose the population has distribution f(x)
- Each observation is labelled X_i
- We always assume that the population is infinite
- Therefore each X_i has distribution f(x)
- We also assume the observations are independent
Definition
Random sample
Remark: Let X_1,\ldots,X_n be a random sample of size n from the population f(x). The joint distribution of \mathbf{X}= (X_1,\ldots,X_n) is f_{\mathbf{X}}(x_1,\ldots,x_n) = f(x_1) \cdot \ldots \cdot f(x_n) = \prod_{i=1}^n f(x_i) (since the X_is are mutually independent with distribution f)
Definition
Random sample
Notation:
When the population distribution f(x) depends on a parameter \theta we write f = f(x|\theta)
In this case the joint sample distribution is f_{\mathbf{X}}(x_1,\ldots,x_n | \theta) = \prod_{i=1}^n f(x_i | \theta)
Example
- Suppose a population has \mathop{\mathrm{Exponential}}(\beta) distribution f(x|\beta) = \frac{1}{\beta} e^{-x/\beta} \,, \qquad \text{ if } \,\, x > 0
- Suppose X_1,\ldots,X_n is random sample from the population f(x|\beta)
- The joint sample distribution is then \begin{align*} f_{\mathbf{X}}(x_1,\ldots,x_n | \beta) & = \prod_{i=1}^n f(x_i|\beta) \\ & = \prod_{i=1}^n \frac{1}{\beta} e^{-x_i/\beta} \\ & = \frac{1}{\beta^n} e^{-(x_1 + \ldots + x_n)/\beta} \end{align*}
Example
We have P(X_1 > 2) = \int_{2}^\infty f(x|\beta) \, dx = \int_{2}^\infty \frac{1}{\beta} e^{-x/\beta} \, dx = e^{-2/\beta}
Thanks to iid assumption we can easily compute \begin{align*} P(X_1 > 2 , \ldots, X_n > 2) & = \prod_{i=1}^n P(X_i > 2) \\ & = \prod_{i=1}^n P(X_1 > 2) \\ & = P(X_1 > 2)^n \\ & = e^{-2n/\beta} \end{align*}
Part 4:
Unbiased estimators
Point estimation
Usual situation: Suppose a population has distribution f(x|\theta)
- In general, the parameter \theta is unknown
- Suppose that knowing \theta is sufficient to characterize f(x|\theta)
Example: A population could be normally distributed f(x|\mu,\sigma^2) = \frac{1}{\sqrt{2\pi\sigma}} \, \exp\left( -\frac{(x-\mu)^2}{2\sigma^2}\right) \,, \quad x \in \mathbb{R}
- Here \mu is the mean and \sigma^2 the variance
- Knowing \mu and \sigma^2 completely characterizes the normal distribution
Point estimation
Goal: We want to make predictions about the population
In order to do that, we need to know the population distribution f(x|\theta)
It is therefore desirable to determine \theta, with reasonable certainty
Definitions:
Point estimation is the procedure of estimating \theta from random sample
A point estimator is any function of a random sample W(X_1,\ldots,X_n)
Point estimators are also called statistics
Unbiased estimator
Definition
Suppose W is a point estimator of a parameter \theta
The bias of W is the quantity \rm{Bias}_{\theta} := {\rm I\kern-.3em E}[W] - \theta
W is an unbiased estimator if \rm{Bias}_{\theta} = 0, that is, {\rm I\kern-.3em E}[W] = \theta
Note: A point estimator W = W(X_1, \ldots, X_n) is itself a random variable. Thus {\rm I\kern-.3em E}[W] is the mean of such random variable
Next goal
We want to estimate mean and variance of a population
Unbiased estimators for such quantities are:
- Sample mean
- Sample variance
Estimating the population mean
Problem
Sample mean
Definition
Sample mean
Sample mean is unbiased estimator of mean
Theorem
Sample mean
Proof of theorem
X_1,\ldots,X_n is a random sample from f(x|\theta)
Therefore X_i \sim f(x|\theta) and {\rm I\kern-.3em E}[X_i] = \int_{\mathbb{R}} x f(x|\theta) \, dx = \mu
By linearity of expectation we have {\rm I\kern-.3em E}[\overline{X}] = \frac{1}{n} \sum_{i=1}^n {\rm I\kern-.3em E}[X_i] = \frac{1}{n} \sum_{i=1}^n \mu = \mu
This shows \overline{X} is an unbiased estimator of \mu
Variance of Sample mean
For reasons clear later, it is useful to compute the variance of the sample mean \overline{X}
Lemma
Variance of Sample mean
Proof of Lemma
By assumption,the population has mean \mu and variance \sigma^2
Since X_i is sampled from the population, we have {\rm I\kern-.3em E}[X_i] = \mu \,, \quad {\rm Var}[X_i] = \sigma^2
Since the variance is quadratic, and the X_is are independent, \begin{align*} {\rm Var}[\overline{X}] & = {\rm Var}\left[ \frac{1}{n} \sum_{i=1}^n X_i \right] = \frac{1}{n^2} \sum_{i=1}^n {\rm Var}[X_i] \\ & = \frac{1}{n^2} \cdot n \sigma^2 = \frac{\sigma^2}{n} \end{align*}
Estimating the population variance
Problem
Sample variance
Definition
Sample variance
Equivalent formulation
Proposition
Sample variance
Proof of Proposition
We have \begin{align*} \sum_{i=1}^n \left( X_i - \overline{X} \right)^2 & = \sum_{i=1}^n \left(X_i^2 + \overline{X}^2 - 2 X_i \overline{X} \right) = \sum_{i=1}^n X_i^2 + n\overline{X}^2 - 2 \overline{X} \sum_{i=1}^n X_i \\ & = \sum_{i=1}^n X_i^2 + n\overline{X}^2 - 2 n \overline{X}^2 = \sum_{i=1}^n X_i^2 -n \overline{X}^2 \end{align*}
Dividing by n-1 yields the desired identity S^2 = \frac{ \sum_{i=1}^n X_i^2 -n \overline{X}^2 }{n-1}
Sample variance
Sample variance is unbiased estimator of variance
Theorem
Sample variance
Proof of theorem
By linearity of expectation we infer {\rm I\kern-.3em E}[(n-1)S^2] = {\rm I\kern-.3em E}\left[ \sum_{i=1}^n X_i^2 - n\overline{X}^2 \right] = \sum_{i=1}^n {\rm I\kern-.3em E}[X_i^2] - n {\rm I\kern-.3em E}[\overline{X}^2]
Since X_i \sim f(x|\theta), we have {\rm I\kern-.3em E}[X_i] = \mu \,, \quad {\rm Var}[X_i] = \sigma^2
Therefore by definition of variance, we infer {\rm I\kern-.3em E}[X_i^2] = {\rm Var}[X_i] + {\rm I\kern-.3em E}[X]^2 = \sigma^2 + \mu^2
Sample variance
Proof of theorem
Also recall that {\rm I\kern-.3em E}[\overline{X}] = \mu \,, \quad {\rm Var}[\overline{X}] = \frac{\sigma^2}{n}
By definition of variance, we get {\rm I\kern-.3em E}[\overline{X}^2] = {\rm Var}[\overline{X}] + {\rm I\kern-.3em E}[\overline{X}]^2 = \frac{\sigma^2}{n} + \mu^2
Sample variance
Proof of theorem
Hence \begin{align*} {\rm I\kern-.3em E}[(n-1)S^2] & = \sum_{i=1}^n {\rm I\kern-.3em E}[X_i^2] - n {\rm I\kern-.3em E}[\overline{X}^2] \\ & = \sum_{i=1}^n \left( \mu^2 + \sigma^2 \right) - n \left( \mu^2 + \frac{\sigma^2}{n} \right) \\ & = n\mu^2 + n\sigma^2 - n \mu^2 - \sigma^2 \\ & = (n-1) \sigma^2 \end{align*}
Dividing both sides by (n-1) yields the thesis {\rm I\kern-.3em E}[S^2] = \sigma^2
Additional note
The sample variance is defined by S^2=\frac{\sum_{i=1}^{n} (X_i-\overline{X})^2}{n-1}=\frac{\sum_{i=1}^n X_i^2-n{\overline{X}^2}}{n-1}
Where does the n-1 factor in the denominator come from?
(It would look more natural to divide by n, instead that by n-1)The n-1 factor is caused by a loss of precision:
- Ideally, the sample variance S^2 should contain the population mean \mu
- Since \mu is not available, we estimate it with the sample mean \overline{X}
- This leads to the loss of 1 degree of freedom
Additional note
General statistical rule: \text{Lose 1 degree of freedom for each parameter estimated}
In the case of the sample variance S^2, we have to estimate one parameter (the population mean \mu). Hence \begin{align*} \text{degrees of freedom} & = \text{Sample size}-\text{No. of estimated parameters} \\ & = n-1 \end{align*}
This is where the n-1 factor comes from!
Notation
The realization of a random sample X_1,\ldots,X_n is denoted by x_1, \ldots, x_n
The realization of the sample mean \overline{X} is denoted \overline{x} := \frac{1}{n} \sum_{i=1}^n x_i
The realization of the sample variance S^2 is denoted s^2=\frac{\sum_{i=1}^{n}(x_i-\overline{x})^2}{n-1}=\frac{\sum_{i=1}^n x_i^2-n{\overline{x}^2}}{n-1}
Capital letters denote random variables, while lowercase letters denote specific values (realizations) of those variables
Exercise
Wage data on 10 Mathematicians
| Mathematician | x_1 | x_2 | x_3 | x_4 | x_5 | x_6 | x_7 | x_8 | x_9 | x_{10} |
|---|---|---|---|---|---|---|---|---|---|---|
| Wage | 36 | 40 | 46 | 54 | 57 | 58 | 59 | 60 | 62 | 63 |
Question: Estimate population mean and variance
Solution to the Exercise
Number of advertising professionals n=10
Sample Mean: \overline{x} = \frac{1}{n} \sum_{i=1}^n x_i = \frac{36+40+46+{\dots}+62+63}{10}=\frac{535}{10}=53.5
Sample Variance: \begin{align*} s^2 & = \frac{\sum_{i=1}^n x_{i}^2 - n \overline{x}^2}{n-1} \\ \sum_{i=1}^n x_i^2 & = 36^2+40^2+46^2+{\ldots}+62^2+63^2 = 29435 \\ s^2 & = \frac{29435-10(53.5)^2}{9} = 90.2778 \end{align*}
Part 5:
Chi-squared distribution
Overview
Chi-squared distribution:
- defined in terms of squares of N(0, 1) random variables
- designed to describe variance estimation
- used to define other members of the normal family
- Student t-distribution
- F-distribution
Why the normal family is important
- Classical hypothesis testing and regression problems
- The same maths solves apparently unrelated problems
- Easy to compute
- Statistics tables
- Software
- Enables the development of approximate methods in more complex (and interesting) problems
Reminder: Normal distribution
X has normal distribution with mean \mu and variance \sigma^2 if pdf is f(x) := \frac{1}{\sqrt{2\pi\sigma^2}} \, \exp\left( -\frac{(x-\mu)^2}{2\sigma^2}\right) \,, \quad x \in \mathbb{R}
In this case we write X \sim N(\mu,\sigma^2)
The standard normal distribution is denoted N(0,1)
Chi-squared distribution
Definition
Definition
Chi-squared distribution
Pdf characterization
Theorem
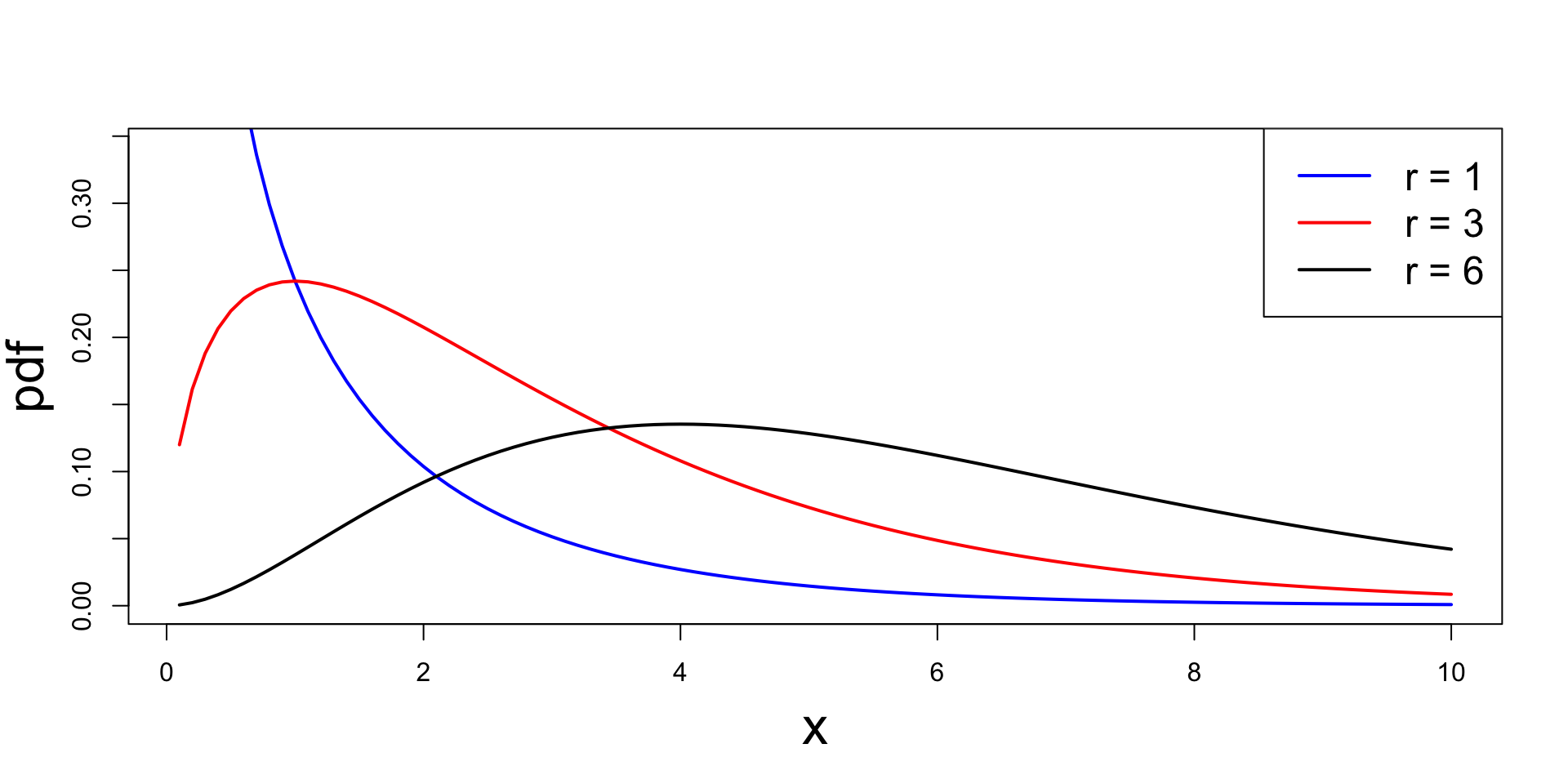
Chi-squared distribution
Plots of chi-squared pdf for different choices of r
Proof of Theorem – Case r =1
- We start with the case r=1
- Need to prove that \chi^2_1 \sim \Gamma(1/2, 1/2)
- Therefore we need to show that the pdf of \chi^2_1 is f_{\chi^2_1}(x)=\frac{x^{-1/2} \, e^{-x/2}}{\Gamma(1/2) 2^{1/2}} \,, \quad x>0
Proof of Theorem – Case r =1
- To this end, notice that by definition \chi^2_1 \sim Z^2 \,, \qquad Z \sim N(0,1)
- Hence, for x>0 we can compute cdf via \begin{align*} F_{\chi^2_1}(x) & = P(\chi^2_1 \leq x) \\ & = P(Z^2 \leq x ) \\ & = P(- \sqrt{x} \leq Z \leq \sqrt{x} ) \\ & = 2 P (0 \leq Z \leq \sqrt{x}) \end{align*} where in the last equality we used symmetry of Z around x=0
Proof of Theorem – Case r =1
- Recalling the definition of standard normal pdf we get \begin{align*} F_{\chi^2_1}(x) & = 2 P (0 \leq Z \leq \sqrt{x}) \\ & = 2 \frac{1}{\sqrt{2\pi}} \int_0^{\sqrt{x}} e^{-t^2/2} \, dt \\ & = 2 \frac{1}{\sqrt{2\pi}} G( \sqrt{x} ) \end{align*} where we set G(x) := \int_0^{x} e^{-t^2/2} \, dt
Proof of Theorem – Case r =1
We can now compute pdf of \chi_1^2 by differentiating the cdf
By the Fundamental Theorem of Calculus we have G'(x) = \frac{d}{dx} \left( \int_0^{x} e^{-t^2/2} \, dt \right) = e^{-x^2/2} \quad \implies \quad G'(\sqrt{x}) = e^{-x/2}
Chain rule yields \begin{align*} f_{\chi^2_1}(x) & = \frac{d}{dx} F_{\chi^2_1}(x) = \frac{d}{dx} \left( 2 \frac{1}{\sqrt{2\pi}} G( \sqrt{x} ) \right) \\ & = 2 \frac{1}{\sqrt{2\pi}} G'( \sqrt{x} ) \frac{x^{-1/2}}{2} = \frac{x^{-1/2} e^{-x/2}}{2^{1/2} \sqrt{\pi}} \end{align*}
Proof of Theorem – Case r =1
- It is well known that \Gamma(1/2) = \sqrt{\pi}
- Hence, we conclude f_{\chi^2_1}(x) = \frac{x^{-1/2} e^{-x/2}}{2^{1/2} \sqrt{\pi}} = \frac{x^{-1/2} e^{-x/2}}{2^{1/2} \Gamma(1/2)}
- This shows \chi_1^2 \sim \Gamma(1/2,1/2)
Proof of Theorem – Case r \geq 2
We need to prove that \chi^2_r \sim \Gamma(r/2, 1/2)
By definition \chi^2_r \sim Z^2_1 + \ldots + Z^2_r \,, \qquad Z_i \sim N(0,1) \quad \text{iid}
By the Theorem in Slide 46, we have Z_1,\ldots,Z_r \,\,\, \text{iid} \quad \implies \quad Z_1^2,\ldots,Z_r^2 \,\,\, \text{iid}
Moreover, by definition, Z_i^2 \sim \chi_1^2
Therefore, we have \chi^2_r = \sum_{i=1}^r X_i, \qquad X_i \sim \chi^2_1 \quad \text{iid}
Proof of Theorem – Case r \geq 2
We have just proven that \chi_1^2 \sim \Gamma (1/2,1/2)
Moreover, the Theorem in Slide 53 guarantees that Y_i \sim \Gamma(\alpha_i, \beta) \quad \text{independent} \quad \implies \quad Y_1 + \ldots + Y_n \sim \Gamma(\alpha,\beta) where \alpha = \alpha_1 + \ldots + \alpha_n
Therefore, we conclude that \chi^2_r = \sum_{i=1}^r X_i, \qquad X_i \sim \Gamma(1/2,1/2) \quad \text{iid} \quad \implies \quad \chi^2_r \sim \Gamma(r/2,1/2)
Part 6:
Sampling from normal distribution
Sampling from Normal distribution
Sample mean and variance: For a random sample X_1,\ldots,X_n defined by S^2 := \frac{1}{n-1} \sum_{i=1}^n \left( X_i - \overline{X} \right)^2 \,, \qquad \overline{X} := \frac{1}{n} \sum_{i=1}^n X_i
Question
Properties of Sample Mean and Variance
Theorem
Let X_1,\ldots,X_n be a random sample from N(\mu,\sigma^2). Then
- \overline{X} and S^2 are independent random variables
- \overline{X} and S^2 are distributed as follows \overline{X} \sim N(\mu,\sigma^2/n) \,, \qquad \frac{(n-1)S^2}{\sigma^2} \sim \chi_{n-1}^2
Properties of Sample Mean and Variance
Proof of Theorem
- To prove independence of \overline{X} and S^2 we make use of the following Lemma
- Proof of this Lemma is technical and omitted
- For a proof see Lemma 5.3.3 in [1]
Lemma
Properties of Sample Mean and Variance
Proof of Theorem
Note that X_i - \overline{X} and \overline{X} are normally distributed, being sums of iid normals
Therefore, we can apply the Lemma to X_i - \overline X and \overline{X}
To this end, recall that {\rm Var}[\overline X] = \sigma^2/n
Also note that, by independence of X_1,\ldots,X_n {\rm Cov}(X_i,X_j) = \begin{cases} {\rm Var}[X_i] & \text{ if } \, i = j \\ 0 & \text{ if } \, i \neq j \\ \end{cases}
Properties of Sample Mean and Variance
Proof of Theorem
Using bilinearity of covariance (i.e. linearity in both arguments) \begin{align*} {\rm Cov}(X_i - \overline X, \overline X) & = {\rm Cov}(X_i,\overline{X}) - {\rm Cov}(\overline X,\overline{X}) \\ & = \frac{1}{n} \sum_{j=1}^n {\rm Cov}(X_i,X_j) - {\rm Var}[\overline X] \\ & = \frac{1}{n} {\rm Var}[X_i] - {\rm Var}[\overline X] \\ & = \frac{1}{n} \sigma^2 - \frac{\sigma^2}{n} = 0 \end{align*}
By the Lemma, we infer independence of X_i - \overline X and \overline X
Properties of Sample Mean and Variance
Proof of Theorem
We have shown X_i - \overline X \quad \text{and} \quad \overline X \quad \text{independent}
By the Theorem in Slide 46, we hence have (X_i - \overline X)^2 \quad \text{and} \quad \overline X \quad \text{independent}
By the same Theorem we also get \sum_{i=1}^n (X_i - \overline X)^2 = (n-1)S^2 \quad \text{and} \quad \overline X \quad \text{independent}
Again the same Theorem, finally implies independence of S^2 and \overline X
Properties of Sample Mean and Variance
Proof of Theorem
We now want to show that \overline{X} \sim N(\mu,\sigma^2/n)
We are assuming that X_1,\ldots,X_n are iid with {\rm I\kern-.3em E}[X_i] = \mu \,, \qquad {\rm Var}[X_i] = \sigma^2
We have already seen in Slides 70 and 72 that, in this case, {\rm I\kern-.3em E}[\overline X] = \mu \,, \quad {\rm Var}[\overline{X}] = \frac{\sigma^2}{n}
Sum of independent normals is normal (see the Theorem in slide 50)
Therefore \overline{X} is normal, with mean \mu and variance \sigma^2/n
Properties of Sample Mean and Variance
Proof of Theorem
- We are left to prove that
\frac{(n-1)S^2}{\sigma^2} \sim \chi_{n-1}^2
- This is somewhat technical and we don’t actually prove it
- For a proof see Theorem 5.3.1 in [1]
- We however want to provide some intuition on why it holds
- Recall that the chi-squared distribution with r degrees of freedom is \chi_r^2 \sim Z_1^2 + \ldots + Z_r^2 with Z_i iid and N(0,1)
Properties of Sample Mean and Variance
Proof of Theorem
By definition of S^2 we have \frac{(n-1)S^2}{\sigma^2} = \sum_{i=1}^n \frac{(X_i - \overline X)^2}{\sigma^2}
If we replace the sample mean \overline X with the actual mean \mu we get the approximation \frac{(n-1)S^2}{\sigma^2} = \sum_{i=1}^n \frac{(X_i - \overline X)^2}{\sigma^2} \approx \sum_{i=1}^n \frac{(X_i - \mu)^2}{\sigma^2}
Properties of Sample Mean and Variance
Proof of Theorem
Since X_i \sim N(\mu,\sigma^2), we have that Z_i := \frac{X_i - \mu}{\sigma} \sim N(0,1)
Therefore \frac{(n-1)S^2}{\sigma^2} \approx \sum_{i=1}^n \frac{(X_i - \mu)^2}{\sigma^2} = \sum_{i=1}^n Z_i^2 \sim \chi_n^2
The above is just an approximation:
When replacing \mu with \overline X, we lose 1 degree of freedom \frac{(n-1)S^2}{\sigma^2} \sim \chi_{n-1}^2
Part 7:
t-distribution
Estimating the Mean
Problem
What to do?
We can collect normal samples X_1, \ldots, X_n with X_i \sim N(\mu,\sigma^2)
We then compute the sample mean \overline X := \frac{1}{n} \sum_{i=1}^n X_i
We know that {\rm I\kern-.3em E}[\overline X] = \mu
\overline X approximates \mu
Question
Answer: We consider the Test Statistic T := \frac{\overline{X}-\mu}{\sigma/\sqrt{n}} \, \sim \,N(0,1)
This is because \overline X \sim N(\mu,\sigma^2/n) – see Slide 101
If \sigma is known, then the only unknown in T is \mu
T can be used to estimate \mu \quad \implies \quad Hypothesis Testing
Hypothesis testing
Suppose that \mu=\mu_0 (this is called the null hypothesis)
Using the data collected \mathbf{x}= (x_1,\ldots,x_n), we compute t := \frac{\overline{x}-\mu_0}{\sigma/\sqrt{n}} \,, \qquad \overline{x} = \frac{1}{n} \sum_{i=1}^n x_i
When \mu = \mu_0, the number t is a realization of the test statistic (random variable) T = \frac{\overline{X}-\mu_0}{\sigma/\sqrt{n}} \, \sim \,N(0,1)
Therefore, we can compute the probability of T being close to t p := P(T \approx t)
Hypothesis testing
Given the value p := P(T \approx t) we have 2 cases:
- p is small \quad \implies \quad reject the null hypothesis \mu = \mu_0
- p small means it is unlikely to observe such value of t
- Recall that t depends only on the data \mathbf{x}, and on our guess \mu_0
- We conclude that our guess must be wrong \quad \implies \quad \mu \neq \mu_0
- p is large \quad \implies \quad do not reject the null hypothesis \mu = \mu_0
- p large means that t occurs with reasonably high probability
- There is no reason to believe our guess \mu_0 was wrong
- But we also do not have sufficient reason to believe \mu_0 was correct
Important Remark
The key step in Hypothesis Testing is computing p = P(T \approx t)
This is only possible if we know the distribution of T = \frac{\overline{X}-\mu}{\sigma/\sqrt{n}}
If we assume that the variance \sigma^2 is known, then T \sim N(0,1) and p is easily computed
Unknown variance
Problem
Idea: We can replace \sigma^2 with the sample variance S^2 = \frac{\sum_{i=1}^n X_i^2 - n \overline{X}^2}{n-1} The new test statistic is hence T := \frac{\overline{X}-\mu}{S/\sqrt{n}}
Distribution of the test statistic
Question
T := \frac{\overline{X}-\mu}{S/\sqrt{n}} \qquad ?
Answer: T has t-distribution with n-1 degrees of freedom
- This is also known as Student’s t-distribution
- Student was the pen name under which W.S. Gosset was publishing his research
- He was head brewer at Guinness, at the time the largest brewery in the world!
- Used t-distribution to study chemical properties of barley from low samples [2] (see original paper )
t-distribution
Definition
Characterization of the t-distribution
Theorem
Proof: Given as exercise in Homework assignments
Distribution of t-statistic
As a consequence of the Theorem in previous slide we obtain:
Theorem
Distribution of t-statistic
Proof of Theorem
Since X_1,\ldots,X_n is random sample from N(\mu,\sigma^2), we have that (see Slide 101) \overline{X} \sim N(\mu, \sigma^2/n)
Therefore, we can renormalize and obtain U := \frac{ \overline{X} - \mu }{ \sigma/\sqrt{n} } \sim N(0,1)
Distribution of t-statistic
Proof of Theorem
We have also shown that V := \frac{ (n-1) S^2 }{ \sigma^2 } \sim \chi_{n-1}^2
Finally, we can rewrite T as T = \frac{\overline{X}-\mu}{S/\sqrt{n}} = \frac{U}{ \sqrt{V/(n-1)} }
By the Theorem in Slide 118, we conclude that T \sim t_{n-1}
Properties of t-distribution
Proposition: Expectation and Variance of t-distribution
Suppose that T \sim t_p. We have:
- If p>1 then {\rm I\kern-.3em E}[T] = 0
- If p>2 then {\rm Var}[T] = \frac{p}{p-2}
Notes:
- We have to assume p>1, otherwise {\rm I\kern-.3em E}[T] = \infty for p=1
- We have to assume p>2, otherwise {\rm Var}[T] = \infty for p=1,2
- {\rm I\kern-.3em E}[T] = 0 follows trivially from symmetry of the pdf f_T(t) around t=0
- Computing {\rm Var}[T] is quite involved, and we skip it
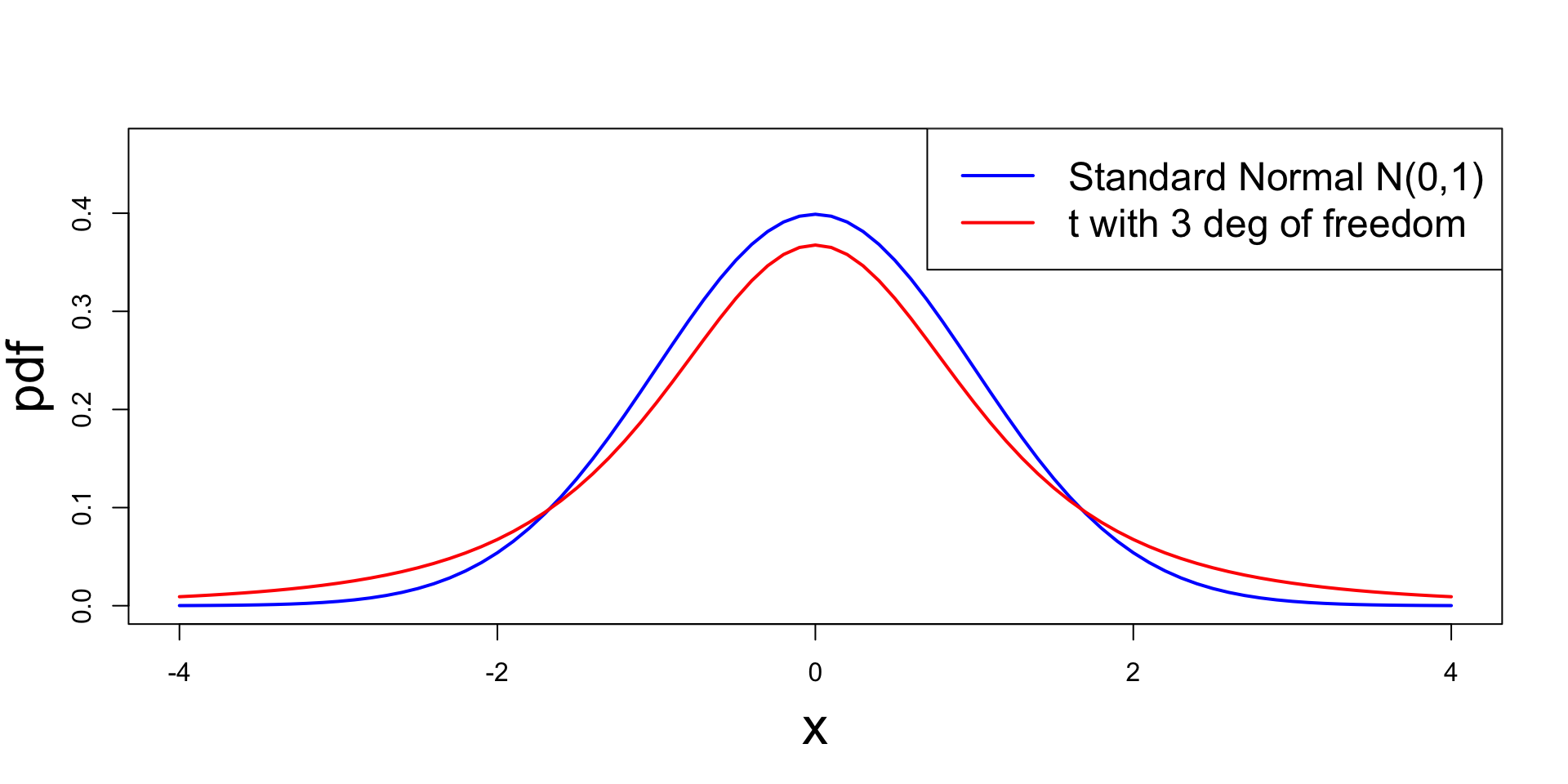
t-distribution
Comparison with Standard Normal
The t_p distribution approximates the standard normal N(0,1):
- t_p it is symmetric around zero and bell-shaped, like N(0,1)
- t_p has heavier tails compared to N(0,1)
- While the variance of N(0,1) is 1, the variance of t_p is \frac{p}{p-2}
- We have that t_p \to N(0,1) \quad \text{as} \quad p \to \infty
Plot: Comparison with Standard Normal